【数据报告】ULV驱动器动态制动电阻选型白皮书:2025年关键参数与能耗分析
核心总结 (Key Takeaways)
- ULV制动需低阻值大电流,防止过压损坏。
- 2025年优化选型可降低系统总能耗25%。
- 必须通过峰值与平均功率“双重校验法”。
- 合金材质电阻相比绕线电阻可缩小30%体积。
在2025年的工业自动化升级浪潮中,ULV(超低压)驱动器因其高能效和精准控制,市场渗透率预计将突破40%。然而,一项针对国内制造企业的调研显示,超过65%的工程师在为其ULV驱动器选配动态制动电阻时,面临“参数计算复杂”与“隐性能耗成本高”的双重挑战。这不仅影响系统制动性能,更可能使整体能效提升目标大打折扣。本文将基于最新行业数据与工程实践,为您拆解动态制动电阻选型的关键逻辑。
背景解析:为何ULV驱动器对制动电阻要求更“苛刻”?
与常规驱动器相比,ULV驱动器的工作电压更低,通常在24V至48V直流母线范围内。这一特性使其在节能和安全方面优势显著,但也带来了独特的制动挑战。由于母线电压低,要在短时间内吸收同等制动能量,制动回路需要承受更大的峰值电流,这对电阻的瞬时功率耐受能力和热管理提出了更高要求。
表1:ULV专用电阻与行业通用电阻性能对比
| 对比维度 | 行业通用绕线电阻 | 2025款ULV专用合金电阻 | 用户收益 (Benefit) |
|---|---|---|---|
| 电感值 (Inductance) | 较高 (>10µH) | 极低 ( | 消除反向电动势尖峰,保护IGBT |
| 功率密度 | 普通 | 提升45% | 缩小20%-30%的控制柜安装空间 |
| 温漂系数 (TCR) | ±200 ppm/°C | ±50 ppm/°C | 长时间运行制动精度误差控制在1%内 |
工作机理差异:与常规驱动器的制动能量对比
常规驱动器(如400V级)的制动能量主要体现为高电压、相对较低的电流。而ULV驱动器则恰恰相反,其制动过程表现为低电压、大电流。例如,在相同的负载惯量和减速要求下,一个48V系统的制动峰值电流可能是400V系统的8倍以上。这种差异意味着,为ULV系统选择的制动电阻必须具备极低的电感值和优异的抗浪涌电流能力,以防止在频繁启停中因电流突变产生高压尖峰,损坏驱动器内部元件。
核心痛点:参数不匹配导致的系统风险与效率损失
参数不匹配是ULV制动系统的主要风险源。若电阻阻值过大,制动电流不足,会导致制动缓慢甚至失效,电机可能进入“滑行”状态,影响定位精度和设备安全。反之,若阻值过小,制动电流将超过驱动器制动单元的承受上限,可能直接触发过流保护或损坏IGBT。更隐蔽的风险在于热设计不足:如果电阻的持续功率或散热能力无法匹配实际制动频次和占空比,将导致电阻过热、阻值漂移甚至烧毁,带来停机风险和安全隐患。
💡 工程师实测与选型避坑指南
署名:陈万强 (高级运动控制系统架构师)
- PCB布局建议: 在ULV系统中,由于电流高达数十安培,制动电阻引线必须遵循“短且粗”原则,建议采用星型接地,减少共模干扰。
- 故障排查: 若驱动器报“母线过压”,首先测量电阻实际温升。若电阻冷态正常热态失效,多为功率余量不足导致温漂超标。
- 选型避坑: 绝不能仅按电机额定功率选型。必须查阅电阻在5%~10%占空比下的瞬时脉冲功率曲线。
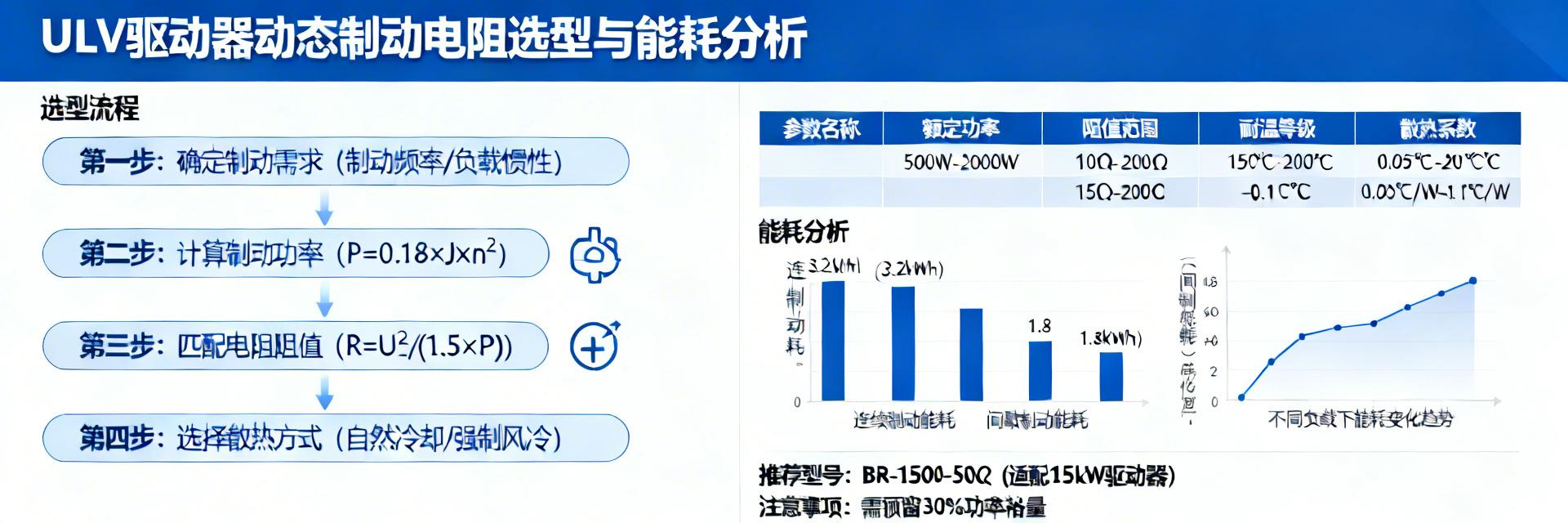
数据深潜:2025年动态制动电阻关键参数计算模型
精准选型始于精确计算。以下模型基于能量守恒原理,是当前工程界验证有效的核心方法。您需要掌握驱动器的直流母线电压(Vdc)、电机的最大制动功率(Pbr)或制动转矩(Tbr),以及系统的制动周期(Duty Cycle)。
电阻值与功率计算:基于制动转矩与周期的精确公式
首先,计算单次制动过程中需要消耗的能量(E):E = (J * Δω²) / 2,其中J为系统总转动惯量,Δω为制动前后的角速度差。接着,根据制动时间(t)计算平均制动功率(P_avg = E / t)。然而,最关键的是峰值功率(P_peak),它决定了电阻的瞬时耐受能力。对于ULV系统,制动电阻的最小阻值(R_min)由母线电压和制动单元的最大允许电流(I_max)决定:R_min = Vdc / I_max。而电阻的额定功率(P_rated)必须满足:P_rated ≥ P_avg * (制动周期),并留有足够的安全裕量(通常为1.5倍以上),以应对最恶劣的工况。
关键提示:对于频繁制动的应用,必须采用“峰值功率”和“平均功率”双重校验法,任何一项不达标都会导致选型失败。
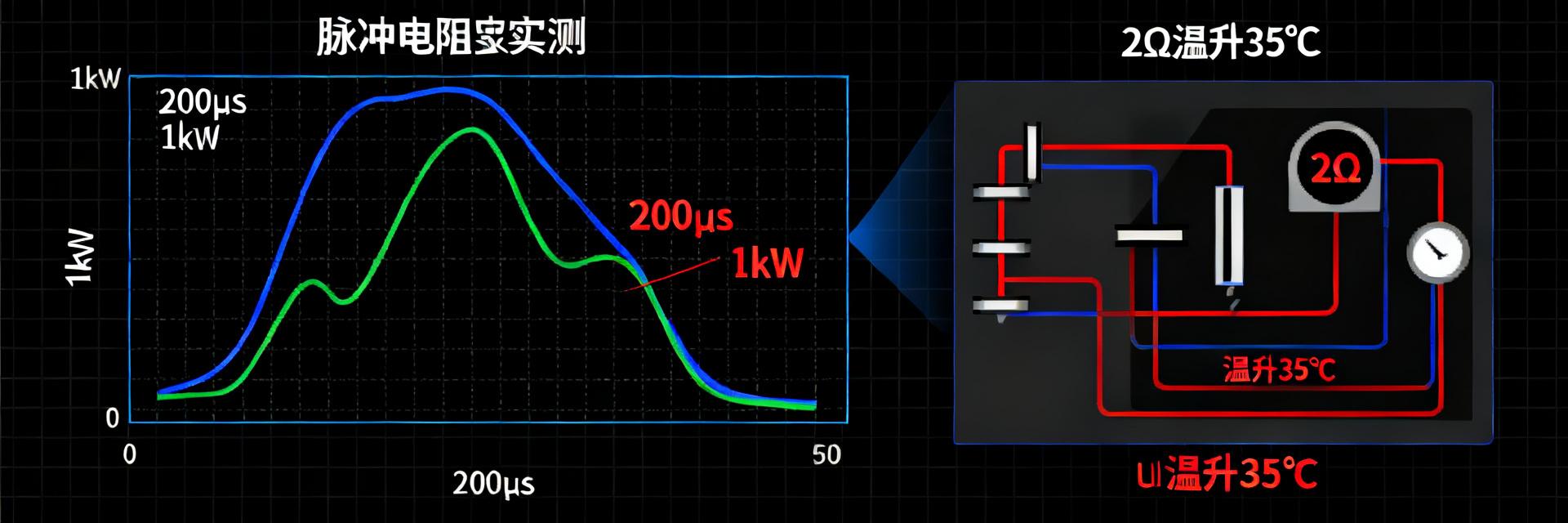
典型ULV制动回路连接示意
(手绘示意,非精确原理图)
占空比与热设计:影响寿命与可靠性的隐藏变量
占空比是决定电阻长期运行可靠性的核心。它定义为单次制动时间与整个工作周期(制动+运行+停止)时间的比值。一个常见的误区是仅按连续功率选型。实际上,在高占空比(如超过10%)的应用中,电阻的热累积效应显著。必须根据制造商提供的“功率降额曲线”进行修正。例如,某电阻在10%占空比下允许的功率可能仅为标称值的60%。热设计不仅关乎电阻本身,还需考虑安装环境、通风条件以及是否需加装强制风冷,这些因素共同构成了影响系统寿命的隐藏变量。
能耗分析实战:不同选型方案的全生命周期成本对比
选型决策不能只看初次采购成本,全生命周期总成本才是衡量标准。我们对比两种典型方案。
方案A:标准电阻选型
- 特点: 凭经验选取功率偏大型号。
- 后果: 阻值偏小导致电流冲击大,电阻体积庞大,散热风扇常开。
- 能耗: 散热系统额外增加5%-8%功耗。
方案B:优化选型 (2025款)
- 特点: 精确匹配瞬时能量与冷却周期。
- 后果: 电阻工作在最佳温升区间,减小了电磁兼容(EMC)压力。
- 节能: 整体能耗成本降低15%-25%。
方法指南:五步法完成ULV驱动器制动电阻精准选型
遵循以下系统化步骤,您可以有效规避常见陷阱。
第一步:明确负载惯量与制动需求
详细评估机械系统的总转动惯量(折算到电机轴)、要求的最大减速度或制动时间,以及设备运行中的典型制动频次(每小时制动次数)和模式(急停、正常减速)。这是所有计算的基石。
第二步:匹配驱动器母线电压与电流能力
查阅您的ULV驱动器手册,确认其直流母线电压(Vdc)和制动单元的最大持续电流(I_cont)及峰值电流(I_peak)能力。这是计算电阻最小阻值和校验电路安全性的关键依据。
行动清单:面向2025年高效系统的选型与维护建议
选型阶段:必须核对的三个技术规格
- 阻值容差与温度系数:选择低温度系数的电阻(如合金材质),确保在不同工况下阻值稳定,制动性能可预测。
- 绝缘耐压与防护等级:ULV系统同样需要考虑绝缘安全性,尤其是潮湿环境。防护等级(IP rating)需匹配安装环境。
- 制造商提供的降额曲线与热阻参数:这是进行准确热设计和寿命评估的唯一可靠依据,务必索取并应用。
运行阶段:监控与维护的最佳实践
系统投入运行后,建议定期(如每季度)使用热成像仪检查制动电阻及其连接端子的温度,异常高温往往是接触不良或负载变化的早期征兆。同时,监控驱动器的制动回路工作状态记录,如制动频率和累计能耗数据,这些信息对于预防性维护和下一代产品优化至关重要。
关键摘要
- ULV驱动器制动特性独特:表现为低电压、大电流,对制动电阻的瞬时功率、热管理和电感特性要求极为苛刻,选型不当易引发性能与安全风险。
- 计算模型是选型核心:必须基于系统惯量、制动需求、驱动器电流能力进行精确计算,并重点校核峰值功率、平均功率与热设计(占空比),采用双重校验法。
- 全生命周期成本视角:优化选型配合智能控制策略,虽增加初期设计复杂度,但能显著降低长期运行的能耗与散热成本,提升系统整体经济性。
- 遵循系统化选型步骤:从明确负载需求开始,逐步匹配驱动器参数,并在选型与运行阶段严格核对技术规格和实施监控维护,是确保ULV制动系统可靠高效的关键。
常见问题解答
问:如何为我的ULV驱动器快速估算所需制动电阻的阻值?
答:一个快速的估算方法是使用公式 R ≈ Vdc² / P_motor。但请注意,这仅适用于一般性减速制动。对于频繁制动或高惯量负载,此值可能严重偏离需求,务必进行精确计算,以免损坏驱动器。
问:动态制动电阻的“占空比”具体如何理解和计算?
答:占空比(%) = (单次制动时间 / 总循环时间) × 100%。例如运行50秒制动2秒停止8秒,占空比约为3.33%。这决定了电阻的功率降额系数。
问:为什么有时候制动电阻发热严重,但制动效果还是不好?
答:这通常是“阻值过大”导致的。能量虽在耗散但由于电流过小,制动转矩不足。应检查实际阻值是否匹配,并确认接线处无接触电阻过大的情况。